八 22

八 16
/孙浚豪
求师得数位学习新课题
高中物理对用微积分解决问题一般不作要求,但很多物理问题又无法回避高等数学的背景。本周课题将通过若干题目和示例来展示一些微积分在高中物理中的应用。
一、从匀变速直线运动说起
本周课程就从高中物理的入门篇——匀变速直线运动展开。
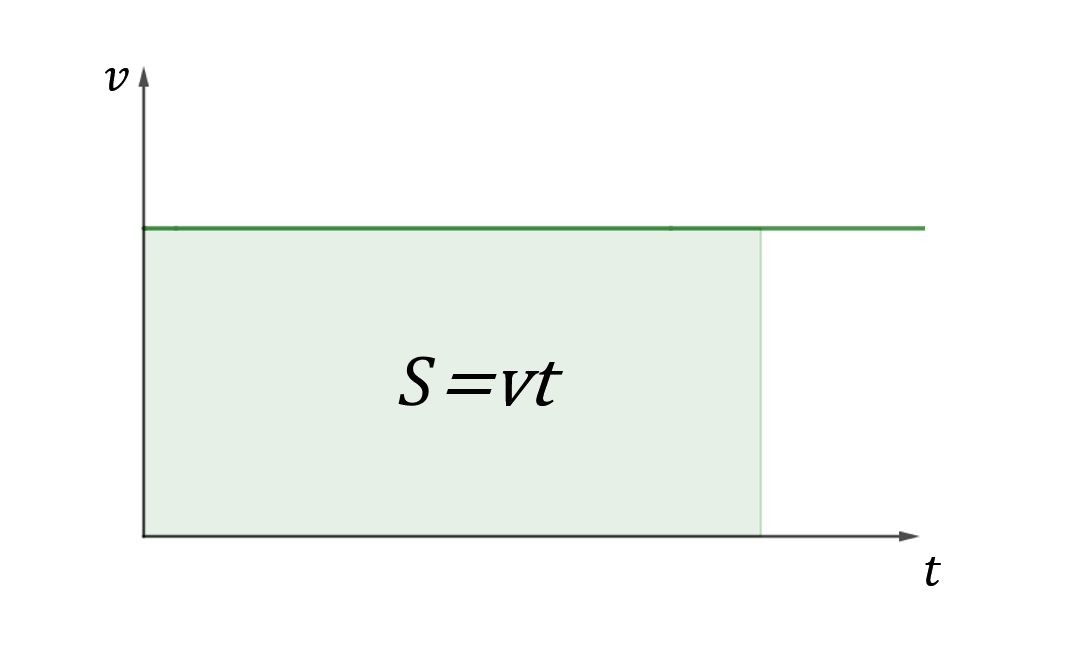
对于更简单的匀速直线运动,我们在小学就学习过:路程=速度*时间。毫无疑问地,匀速直线运动的v—t图像是一条水平的线段(即速度恒定),那么,从0~t时间内,物体运动的路程s=vt的几何意义便是一个矩形的面积。
而对于匀变速直线运动,我们可以将运动分解成n个时间间隔,每个间隔的时间为: ,每个间隔内的最小速度为
,每个间隔内的最小速度为 (i=1,2,3,…,n)则每个间隔的位移近似为
(i=1,2,3,…,n)则每个间隔的位移近似为 ,全程的总位移近似为
,全程的总位移近似为 ,在几何上
,在几何上 体现为所有上的矩形面积和,此时的x小于真实总位移。增大n从而减小,更加接近全程的真实速度,则
体现为所有上的矩形面积和,此时的x小于真实总位移。增大n从而减小,更加接近全程的真实速度,则 更加接近对应的真实位移,x也更加接近真实总位移,矩形面积和也更加接近梯形面积;令n趋近于无穷,则和x趋近于真实值,对n取极限后,矩形面积和等于梯形面积。这也就是说:图线与横纵轴所围成图形的面积即为真实的位移。因此直接求得梯形面积,就可算出对应的匀变速运动的位移。其他物理过程同理。
更加接近对应的真实位移,x也更加接近真实总位移,矩形面积和也更加接近梯形面积;令n趋近于无穷,则和x趋近于真实值,对n取极限后,矩形面积和等于梯形面积。这也就是说:图线与横纵轴所围成图形的面积即为真实的位移。因此直接求得梯形面积,就可算出对应的匀变速运动的位移。其他物理过程同理。
当然,如果表示的是每个间隔的最大速度,取和后x大于真实值,但取极限后,x转化为真实值,仍旧体现为图线与横纵轴所围成图形的面积。
分割,化“变”为“恒”获得物理意义;求和,获得宏观近似值;取极限,获得精确值。
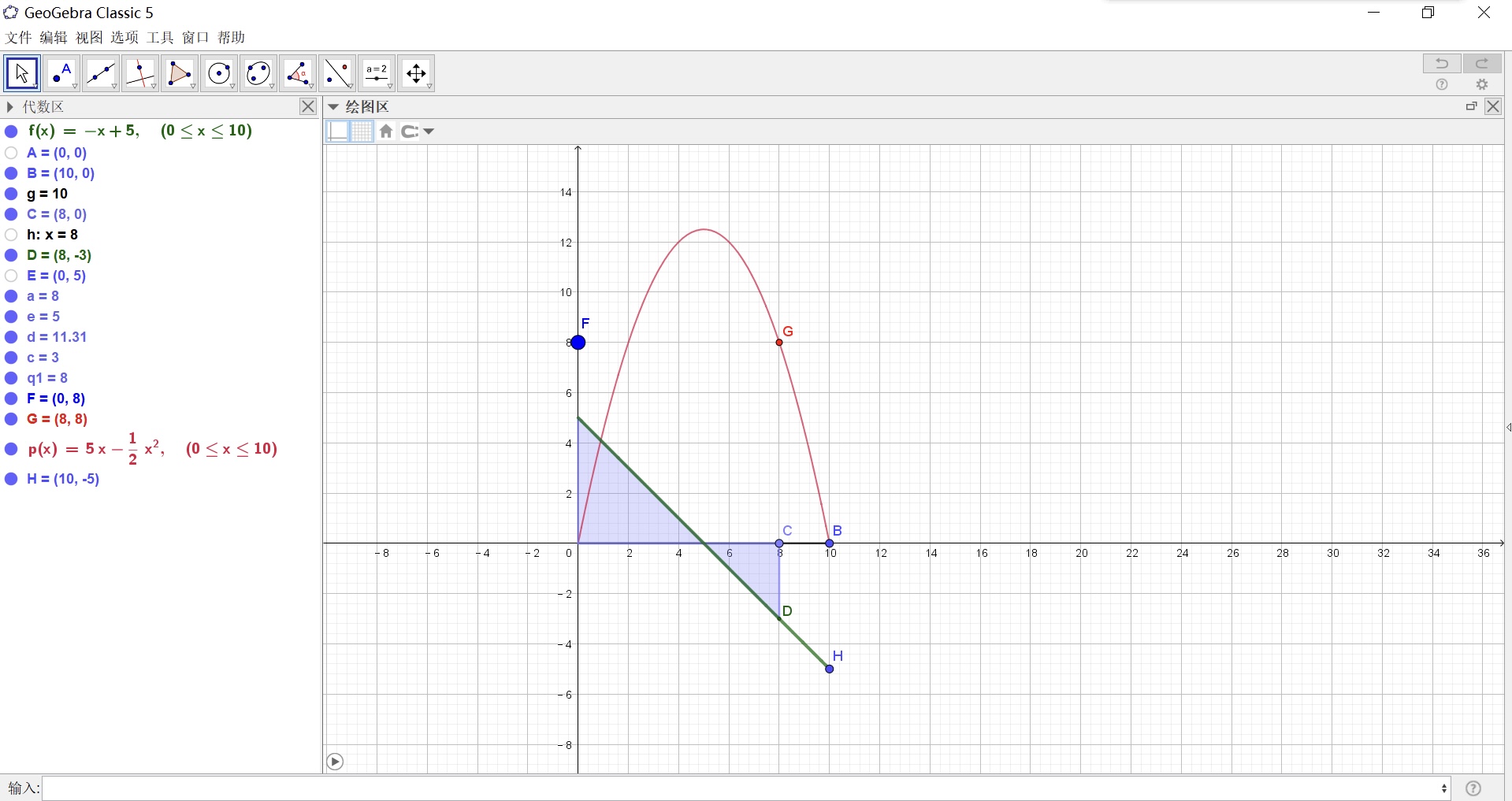
★1 模拟回到出发点的匀变速直线运动:v=-t+5
1.1 首先在指令栏输入“f(x) = 如果(0<=x<=10,-x+5)”画出v—t图像。
1.2 取原点A(0,0),B(10,0),作线段AB,并在射线AB上任取一点C,限定C的横坐标大于0,用C的横坐标来表示时间。
1.3 过C点作x轴的垂线,交f(x)于D,D点的纵坐标就代表t时刻物体的速度。
1.4 取E(0,5)代表物体的初速度 。
。
1.5 用多边形工具依次选取点C、D、E、A、C得到q1。
1.6 在指令栏输入(0,q1),纵坐标多边形的面积q1就是我们提到的“v—t图与x轴所成的面积”。至此,我们就得到了一个回到起始点的匀变速直线运动。
1.7 在指令栏输入(x(C),q1)并追踪得到的G点的轨迹,我们就可以得出运动的x—t图像。
1.8 启动点C的动画就可以看到运动的动态的过程。
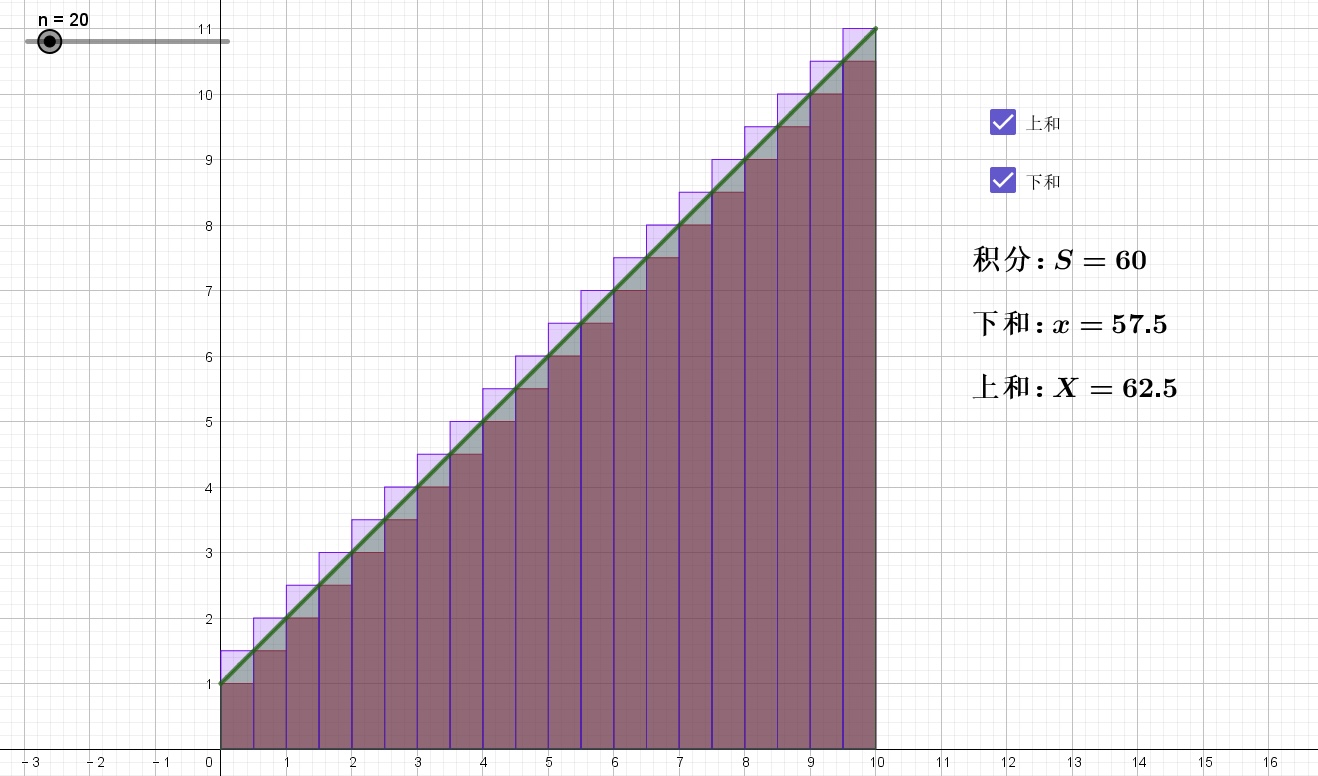
★2 探究矩形面积和与梯形面积的关系
2.1这里我们使用另一种初速度不为0的匀加速直线运动来进行验证计算:在指令栏输入“f(x) = 如果(0<=x<=10, x+1)”画出v—t图像。
2.2 创建滑动条n,最小值设为10,最大值设为100,增量为1。将运动平分为n个时间间隔。
2.3 输入“下和(f,0,10,n)”得到若干矩形的面积和即为:用每段时间间隔内速度的最小值来估算总位移。
2.4 输入“上和(f,0,10,n)”得到若干矩形的面积和即为:用每段时间间隔内速度的最大值来估算总位移。
2.5 输入“积分(f,0,10)”展示出梯形面积,即真实位移大小。
2.6我们可以通过文本框的工具将这几个量显示出来,便于我们观察。拖动滑动条n,不难发现,当n越来越大值,我们做出的“上和”和“下和”的值也越接近积分值。这也符合我们的计算。
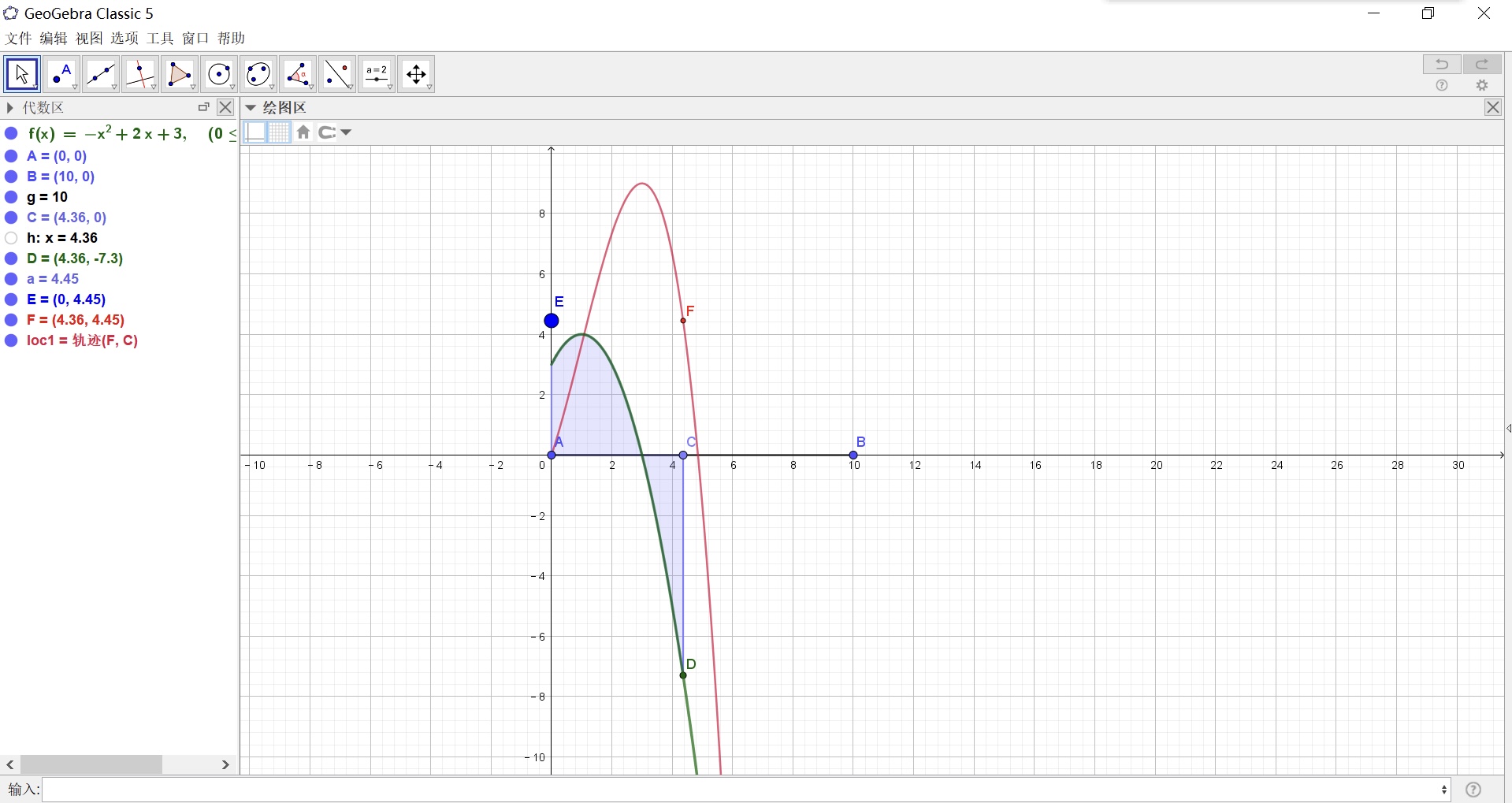
二、变加速直线运动
★3 模拟运动: .
.
3.1 与上面一样地,在指令栏输入“f(x) = 如果(0<=x<=10, -x^2+2x+3)”画出v—t图像。
3.2 取点A(0,0),B(10,0)在线段AB上取点C,点C的横坐标表示时间t.
3.3 过C点作x轴的垂线,交f(x)于D点,D点的纵坐标表示t时刻物体的速度。
3.4 输入“积分(f,0,x(C))”得到f(x)与x轴所成图形的面积。如果在一个运动中我们规定了正方向,那么当v<0时产生的位移也为负,所以在x轴下方的面积记为负数。
3.5 输入“(0,积分(f,0,x(C)))”得到的E点就可以模拟这一运动,输入“(x(C),积分(f,0,x(C)))”,得到F点并追踪其轨迹,可以得到x—t图像。
3.6 启动C点动画可以看到E点运动情况。
3.6由于速度关于时间的导数表示运动的加速度,在指令栏输入“导数(f(x))”得到的曲线便是a—t图像。
三、简谐运动
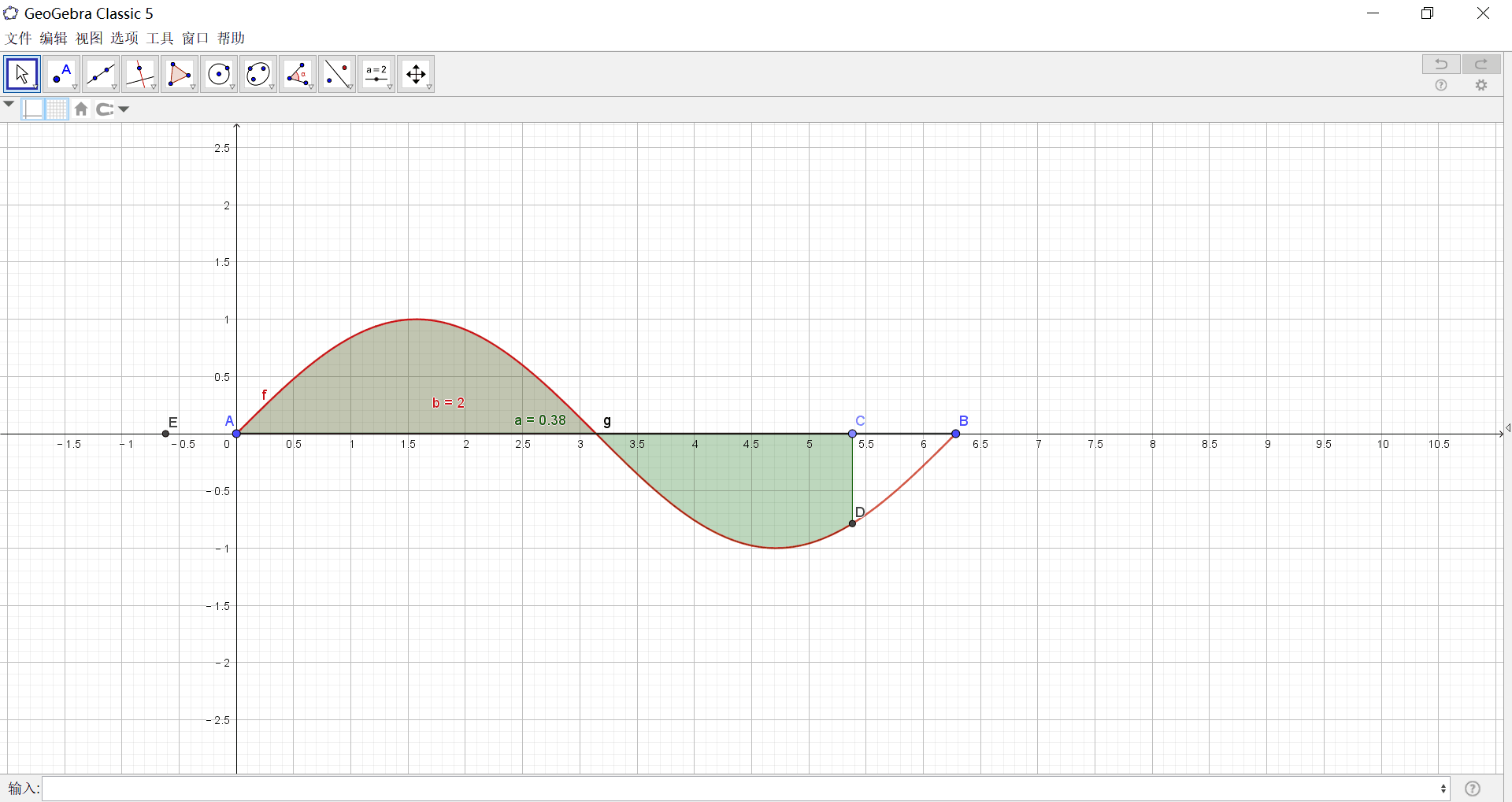
★4 简谐运动:v=sin(t)
4.1 根据上面的知识,我们画出一个周期内的v—t图像。“f(x) = 如果(0 ≤ x ≤ 2π, sin(x))”
4.2 在x轴上取点:A(0,0),B(2π,0),连接线段AB,并在AB上取点C,点C的横坐标表示时间。
4.3 过C做x轴的垂线,交f(x)于点D,点D的纵坐标表示物体的速度,CD扫过的面积即为物体的位移(x轴上方为正)。
4.4 输入“积分(f, 0, x(C))”表示出物体的位移,我们不难发现,当x(C)= π时,物体的位移达到最大值,此后,D点纵坐标值为负,物体位移开始减小。
4.5 输入“积分(f, 0, π)”,GeoGebra会给出:b=2,即为物体做简谐运动的两个最远位置之间的距离,也即为振幅的二倍。
4.6 输入(a-1,0),即得到以原点为平衡位置的一个简谐运动。
四、雨滴下落模型
在雨天,我们可以看到无数雨滴落下,我们不禁就会想到,雨滴从如此高的云层落下,为什么速度却没有我们想象中的那么快呢?这其实是因为雨滴所受到的空气阻力并不是恒定的,而是与速度相关联,所以雨滴下落并不是匀变速直线运动。当雨滴速度增加,所受到的空气阻力也会变大,从而雨滴的加速度减小,直至达到最大速度,(即“收尾速度”)。
·阻力与速度成正比的运动:
我们假设雨滴下落过程中阻力与速度成正比,f=-kv
根据加速度的定义
 :
我们可以列出微分方程:
:
我们可以列出微分方程:

在GeoGebra中有工具:“解常微分方程( <f '(x, y)>, <f 上的点> )”
其中:f’(t,v)= (mg-kv)/m,再根据初始条件:当t=0时初速度为v_0;所以我们可以确定(0,v_0)在v—t图像上。
同样地,根据:

我们可以求出x与t的关系。
下面我们来操作一下:
★5 阻力与速度成正比的运动。
5.1 在代数区建立滑动条g=10,m=1,k=2,v_0=0.我们以竖直向上为正方向。
5.2 在指令栏输入“解常微分方程((-mg+ky)/m,(0,v_0))”可以得到v—t的关系;再输入“解常微分方程(f(x), (0, 0))” 可以得到x—t的关系h(x)
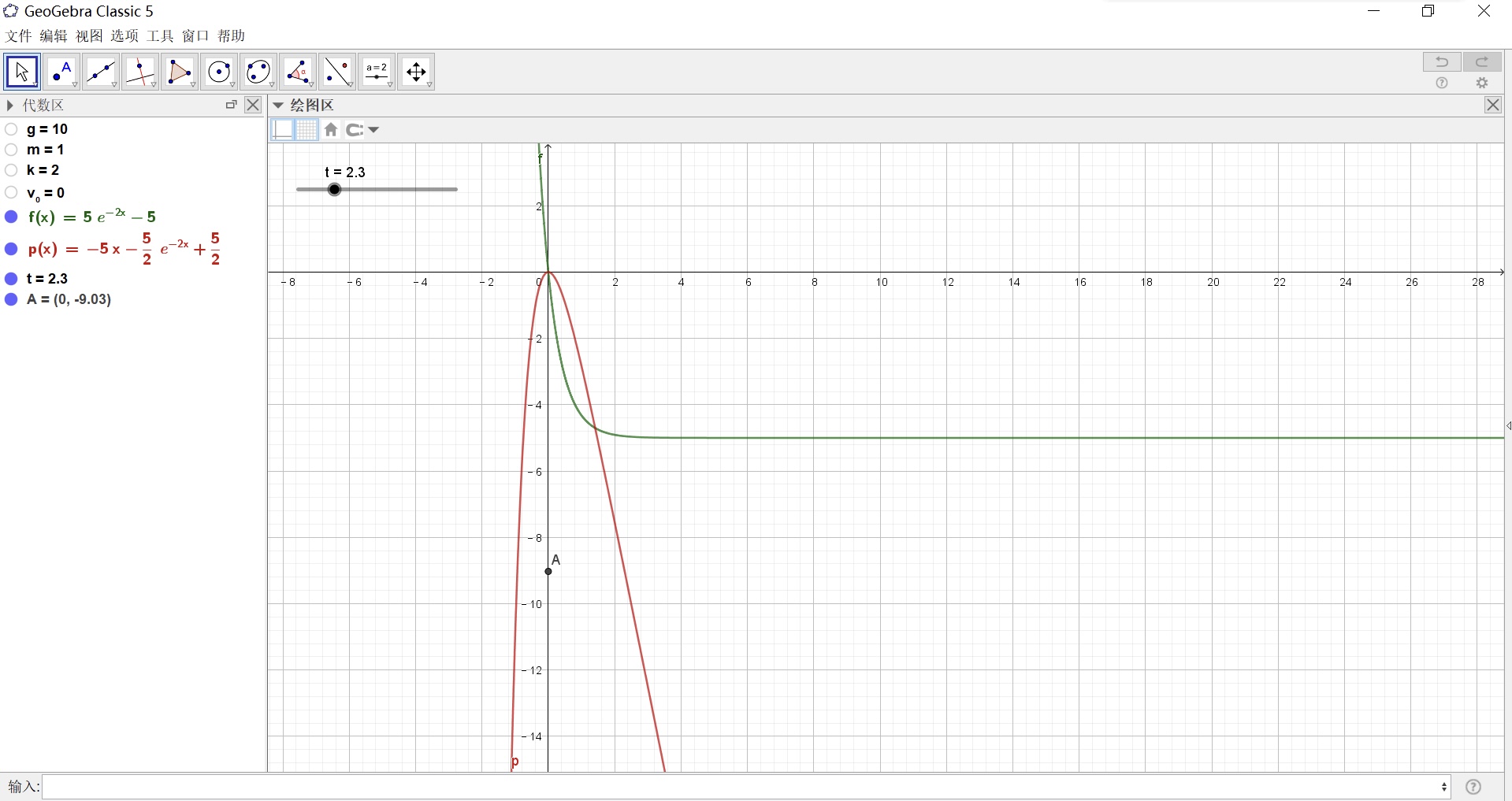
5.3 建立滑动条t,表示运动时间,在指令栏输入“(0,h(t))”描出雨滴的位置。
由于运动的速度较大,不便于屏幕中显示,因此我们也可以进行适当的缩放。
5.4 这里面,f(t)就代表雨滴的瞬时速率,|k f(t)|即为雨滴受到加速度的大小。
5.5 我们可以在图中用矢量标记出雨滴的受力情况,这里留给大家自行尝试。
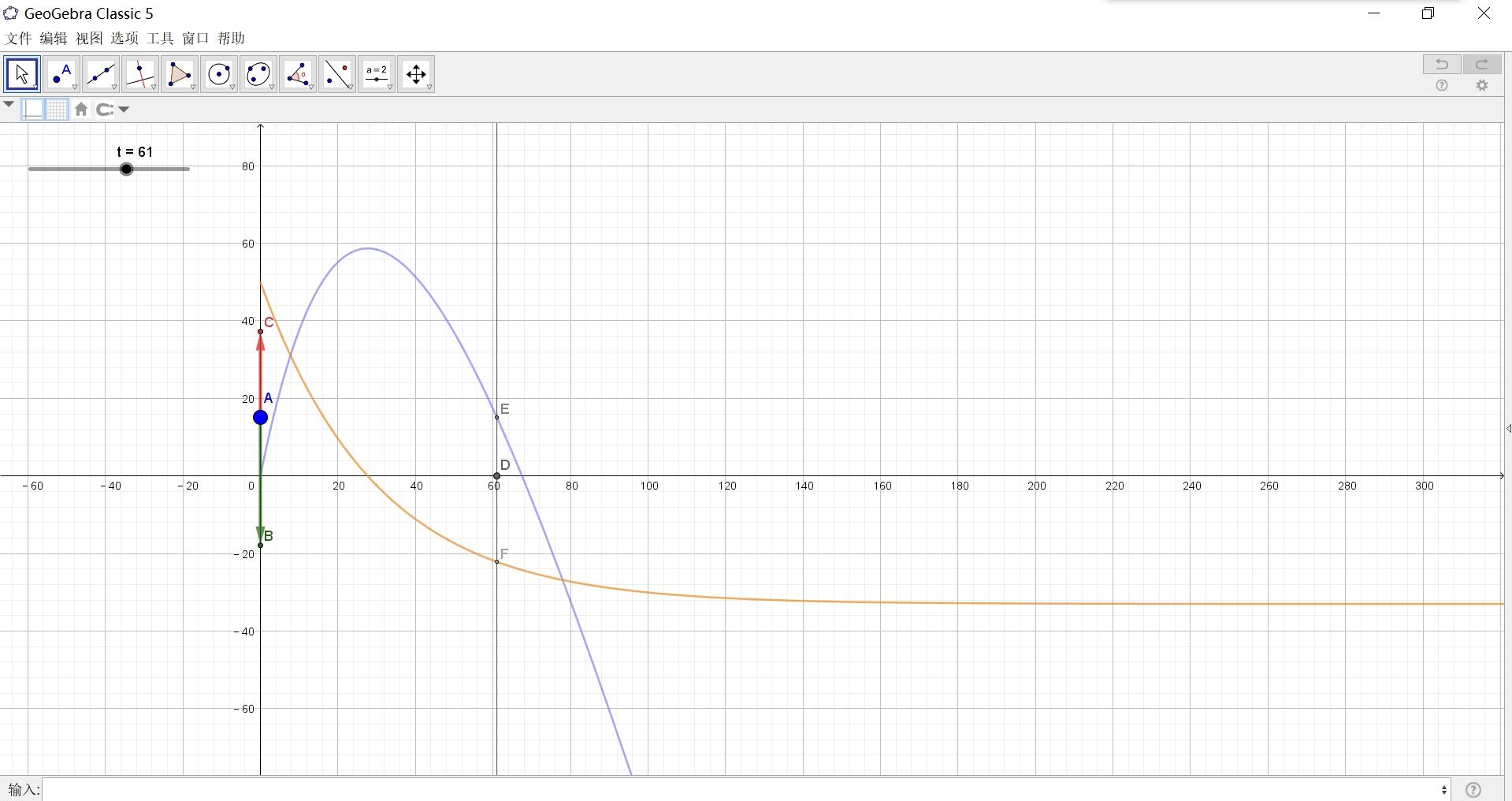
5.6 改变v_0的值,可以模拟考虑空气阻力的上抛运动,找到x—t图像与x轴的交点,可以看出物体落回地面的时间,进而还可以看出落回地面的速度。另外,物体落回地面,也即位移x=0,所以图中两块阴影面积大小相等。

到这里,我们看似已经解决了雨滴下落问题,然而,空气阻力与速度成正比只是我们的一种近似。其实,在实际问题中,我们还会遇到某些模型的阻力近似与速度的平方成正比。
☆5.a大家可以尝试模拟f=-kv^2的运动模型。
☆5.b如果初速度不是竖直方向,那么对x方向也是相同的方法,大家可以尝试初速度为v_0,与水平方向夹角为θ的斜上抛,f=-kv
☆5.c 更广泛地,阻力与速度相关联的运动不止雨滴下落模型这一种,在电磁感应滑轨模型中安培力与速度也是关联的。现在列出以下几种电路的答案,抛砖引玉,感兴趣的同学可以尝试:
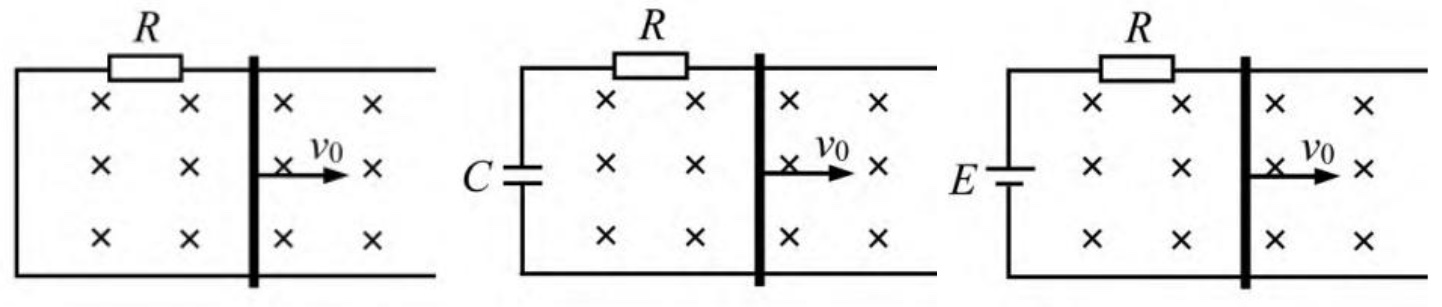






张珉硕:动杆问题的一般方程组[?]
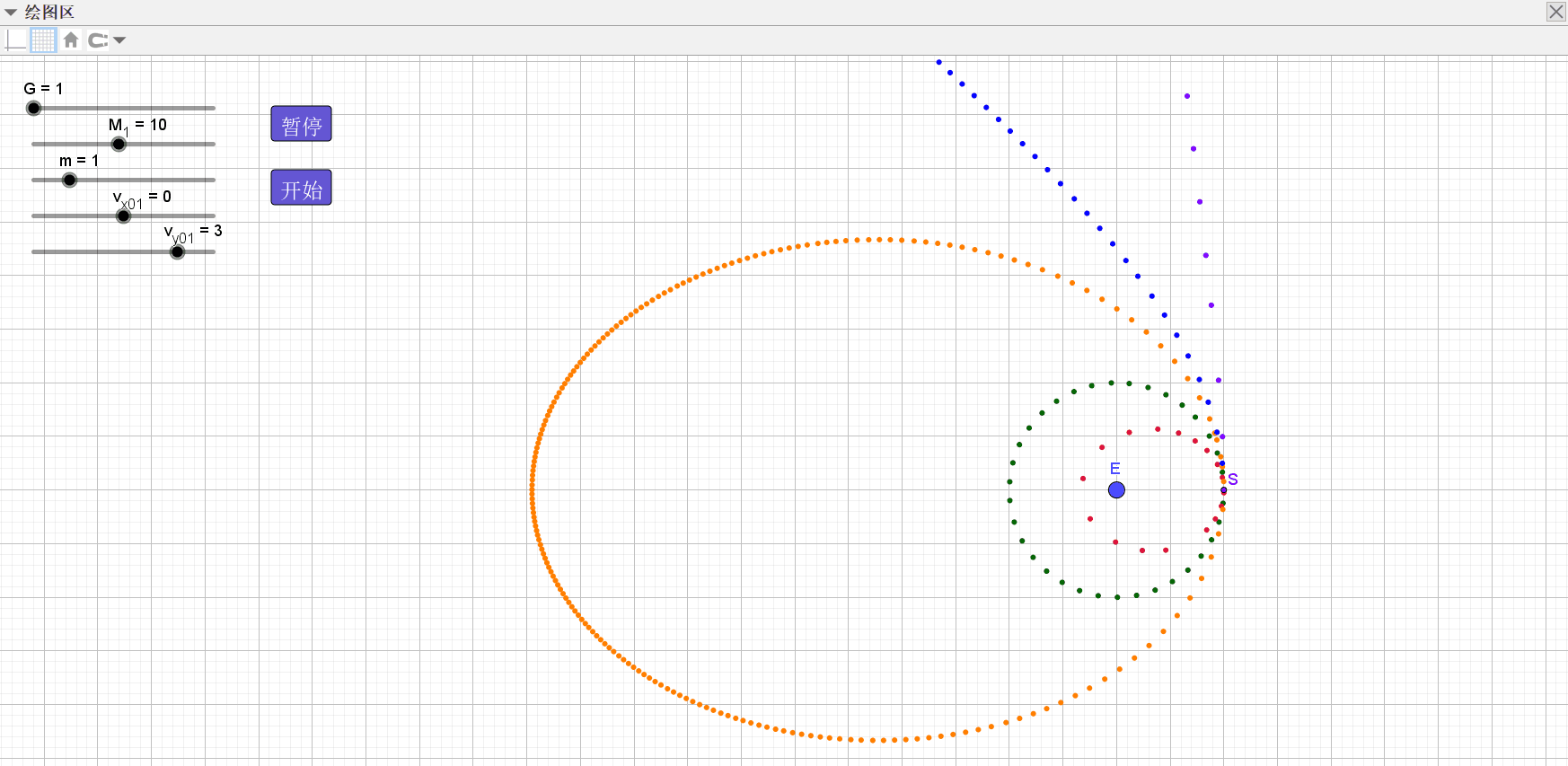
五、卫星轨道
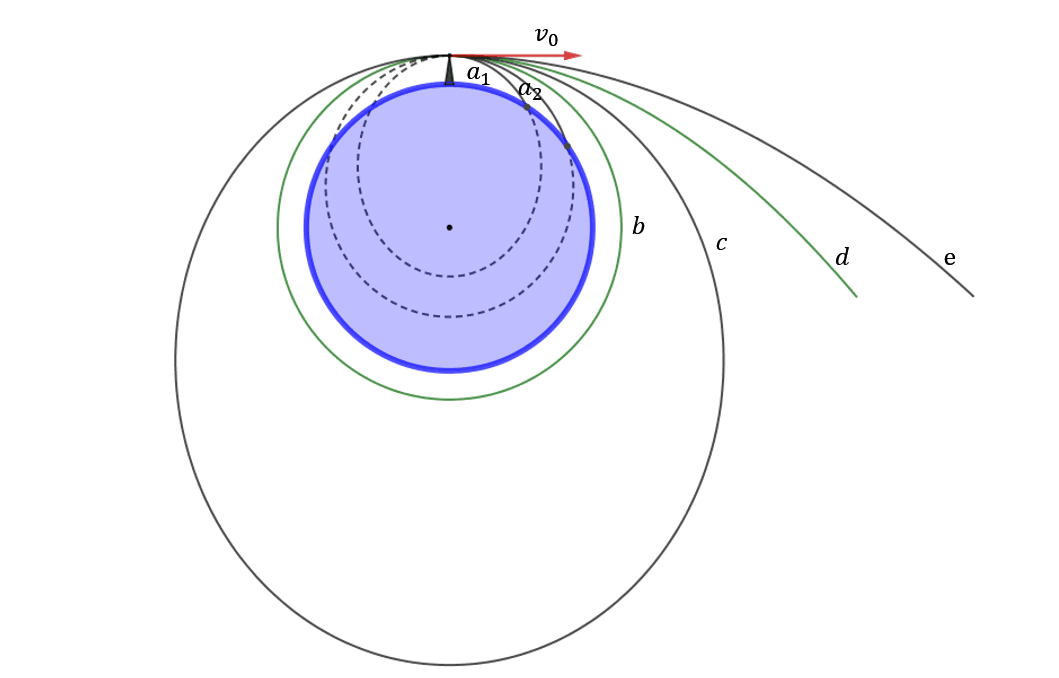
如图所示,在离地面一定高度水平抛出一物体,当初速度小于第一宇宙速度时,物体沿椭圆曲线a1、a2落地;当速度为第一宇宙速度时,物体沿圆轨道b运行;当初速度介于第一宇宙速度和第二宇宙速度之间时,物体沿椭圆轨道c运行;初速度等于第二宇宙速度时,物体沿抛物线轨道d离开地球,大于第二宇宙速度时物体沿双曲线e离开地球。
为了模拟这一现象,可先由牛顿第二定律和几何关系,建立微分方程组:

下面我们就可以利用GeoGebra进行动画模拟:
我们基于“解常微分方程组”的指令,模拟天体运动。
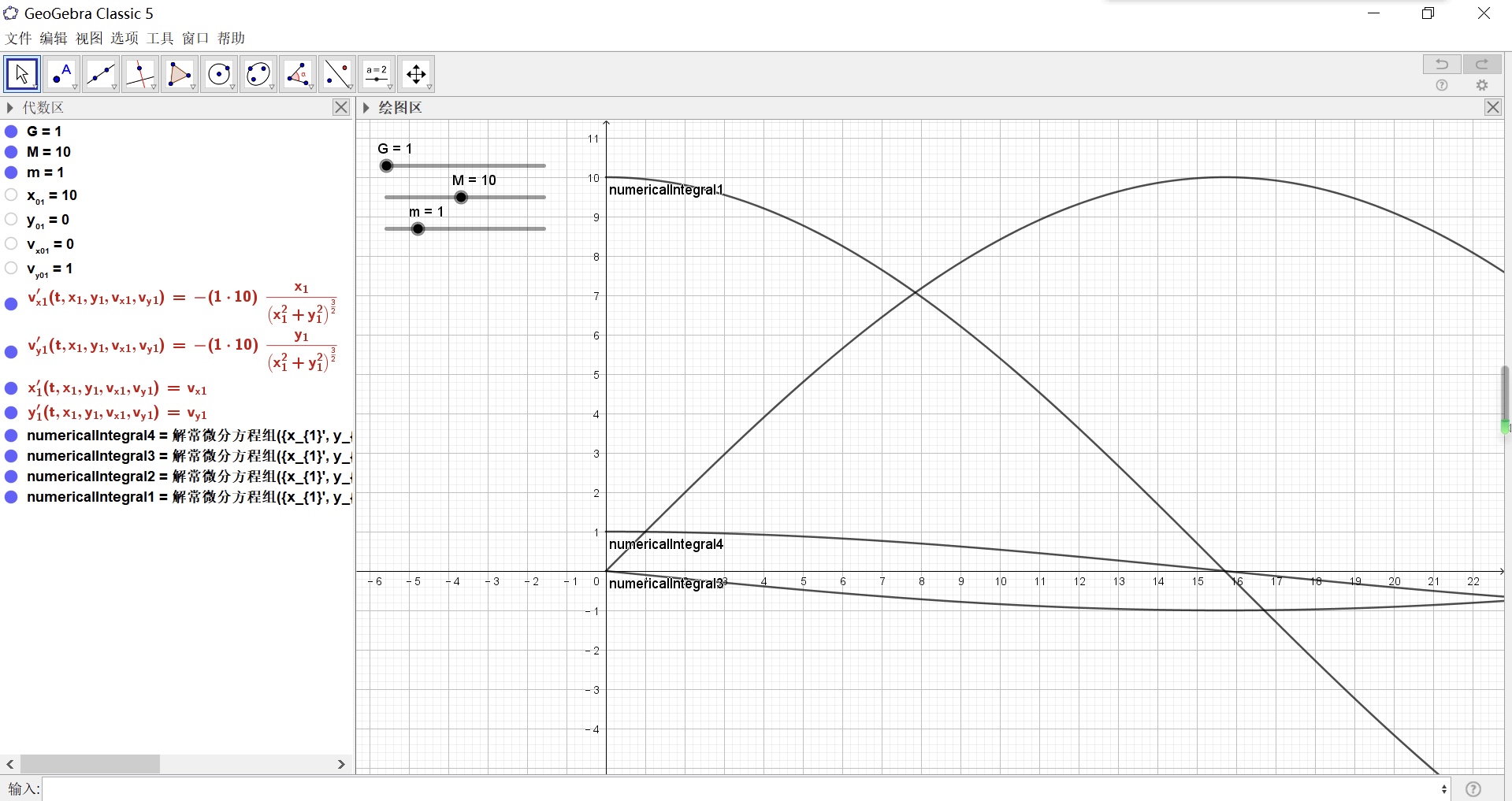
6.1 在代数区中定义参数滑动条,为方便起见,可设G=1,M=10,m=1,环绕天体初始位置的横坐标x_{01}=10,纵坐标y_{01}=0,初速度水平分量v_{x01}=0,竖直分量v_{y01}=1.
6.2 根据微分方程分别输入:
“v_{x1}'(t, x_1, y_1, v_{x1}, v_{y1}) = -(G M) x_1 / ((x_1)² + (y_1)²)^(3/2)”
“v_{y1}'(t, x_1, y_1, v_{x1}, v_{y1}) = -(G M) y_1 / ((x_1)² + (y_1)²)^(3/2)”
“x_{1}'(t, x_1, y_1, v_{x1}, v_{y1}) = v_{x1}”
“y_{1}'(t, x_1, y_1, v_{x1}, v_{y1}) = v_{y1}”
6.3 再使用GeoGebra的“解常微分方程组”指令输入:
“解常微分方程组({x_{1}',y_{1}',v_{x1}',v_{y1}'},0,{x_{01},y_{01},v_{x01},v_{y01}},1000)”
直接输入后,软件会自动分别给出“x_{1}--t”、“y_{1}--t”、“v_{x1}--t”、“v_{y1}--t”的图像,自动命名为:“numericalIntegral1”、“numericalIntegral2”、“numericalIntegral3”、“numericalIntegral4”。指令中第一部分是导数列表,第二部分的“0”为t的初始值,第三部分分别是t=0时的“x_{1}”、“y_{1}”、“v_{x1}”、“v_{y1}”的值,第四部分的1000为t的终止值。
6.4 输入“l = 长度(numericalIntegral1)”给出构成图像的点的数目。
输入“t'=滑动条(0, 1, 1/l)”,其中1/l为增量,这样t'每次增加都会对应于“numericalIntegral1”中的下一个点。
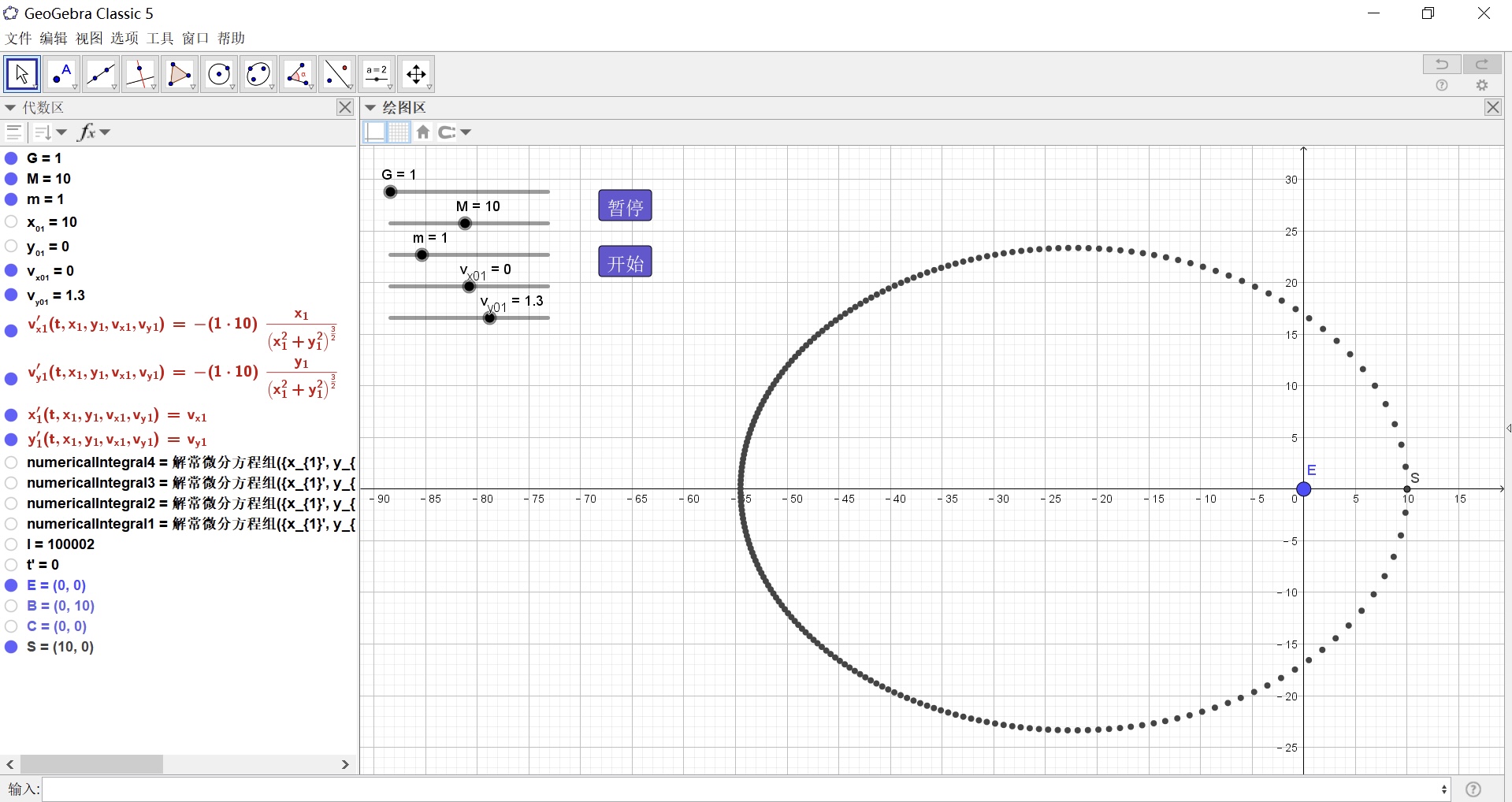
6.5 接着设中心天体所在位置为“E=(0,0)”。
为了得到环绕天体的位置,先输入“B =描点(numericalIntegral1, t')”,得到(t , x_{1})点,该描点指令中第二个t'是路径值,取值在0~1之间,决定了取值在numericalIntegral1中的相应位置,例如,若取“0”则为第一个点,“1”则为最后一个点,“1/l”则为第二个点。
再输入“C =描点(numericalIntegral2, t')”,得到(t , y_{1})点
输入“D=(y(B),y(C))”即可得到环绕天体的位置坐标。
最后,启动t'动画,即可观察到环绕天体的运动。t'乘上1000就是模拟时间t。
6.6 这样我们就得到了地球卫星的运动模拟动画,调整滑动条t'的速度以便于观测,也可以选择跟踪卫星S的轨迹,添加按钮更方便操作……
6.7 解微分方程后得到四条曲线,其中1和2表示x,y的位置坐标,3和4分别表示速度在x,y方向上的分量,所以卫星的速度应该就是:
6.8 通过这个模型,我们可以探究开普勒第二定律。如果想要描出等时间间隔的卫星位置就需要用到指令“序列( <代数式>, <变量>, <起始值>,<终止值>, <增量> )”
建立滑动条间隔数量n。在指令栏输入:“l1=序列(描点(numericalIntegral1, a), a, 0, 0.5, 0.01)”描出每个时刻对应的B点;输入“l2=序列(描点(numericalIntegral2, a), a, 0, 0.5, 0.01)”描出每个时刻对应的C点;输入“l3=序列((y(元素(l1, b)), y(元素(l2, b))), b, 1, n, 1)”描出每个时刻的卫星位置。
这里有另外一个指令“元素( <列表>, <元素位置> )”例如,列表l1的第一项可以用“元素(l1,1)”来表示。
6.9 输入“圆锥曲线(元素(l3, 1), 元素(l3, 2), 元素(l3, 3), 元素(l3, 4), 元素(l3, 5))”来描出卫星运动轨道。由于没有工具可以直接画出椭圆焦点与椭圆上两点连成的封闭图形,所以我们需要做出一定的变化。取圆锥曲线c与x轴的两个交点,并取这两个点的中点M。输入“l4=序列(扇形(c, 元素(l3, t), 元素(l3, t + 1)), t, 1, n - 1, 1)”可以描出M点与c上相邻两点组成的封闭图行;输入“l5=序列(多边形(M, 元素(l3, t), 元素(l3, t + 1)), t, 1, n, 1)”可以描出M点与c上相邻两点连成三角形的面积。二者相见就得到c上相邻两点形成的类似“弓形”的面积,其再加上该两点与焦点连成三角形的面积,即为地球与卫星连线扫过的面积。所以,输入“l6=序列(多边形(E,元素(l3, t),元素(l3, t + 1)), t, 1, n, 1)”、“l7=序列(元素(l4, t) - 元素(l5, t) + 元素(l6, t), t, 1, n, 1)”其中,l7中各项即为一个时间间隔内扫过面积。
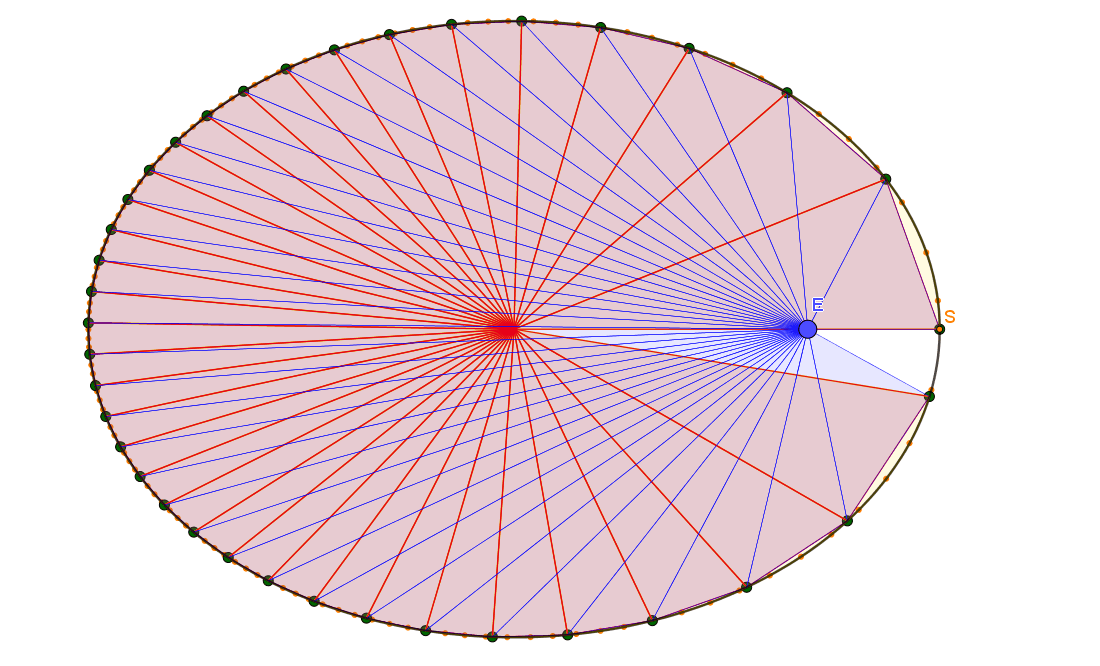
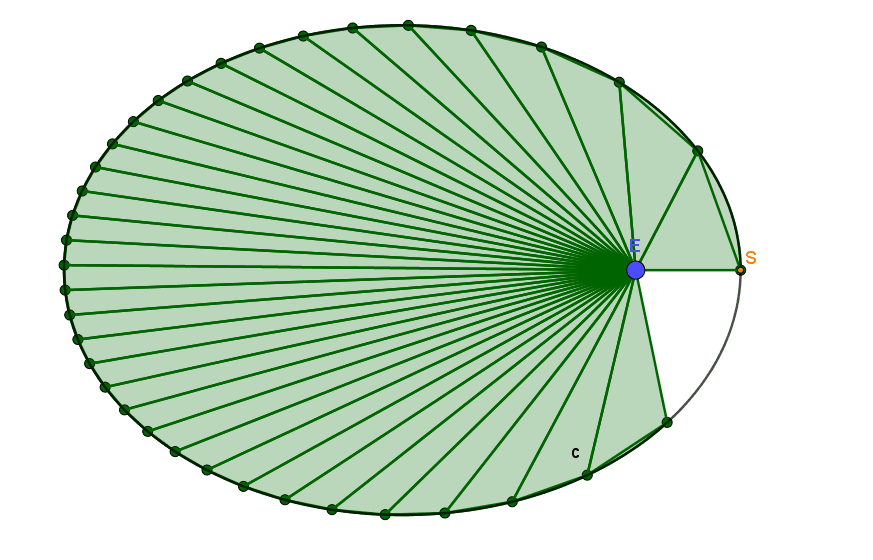
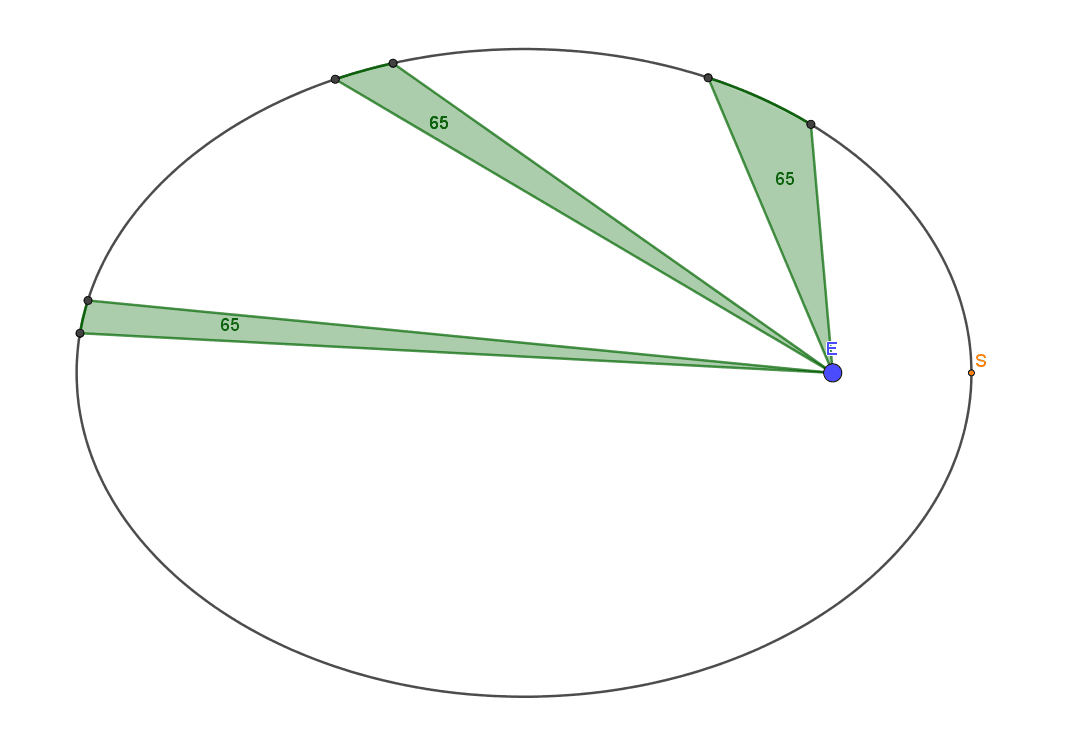
6.10 我们打开代数区,查找l7数据,发现l7中每一项都相等,这便验证了开普勒第二定律。

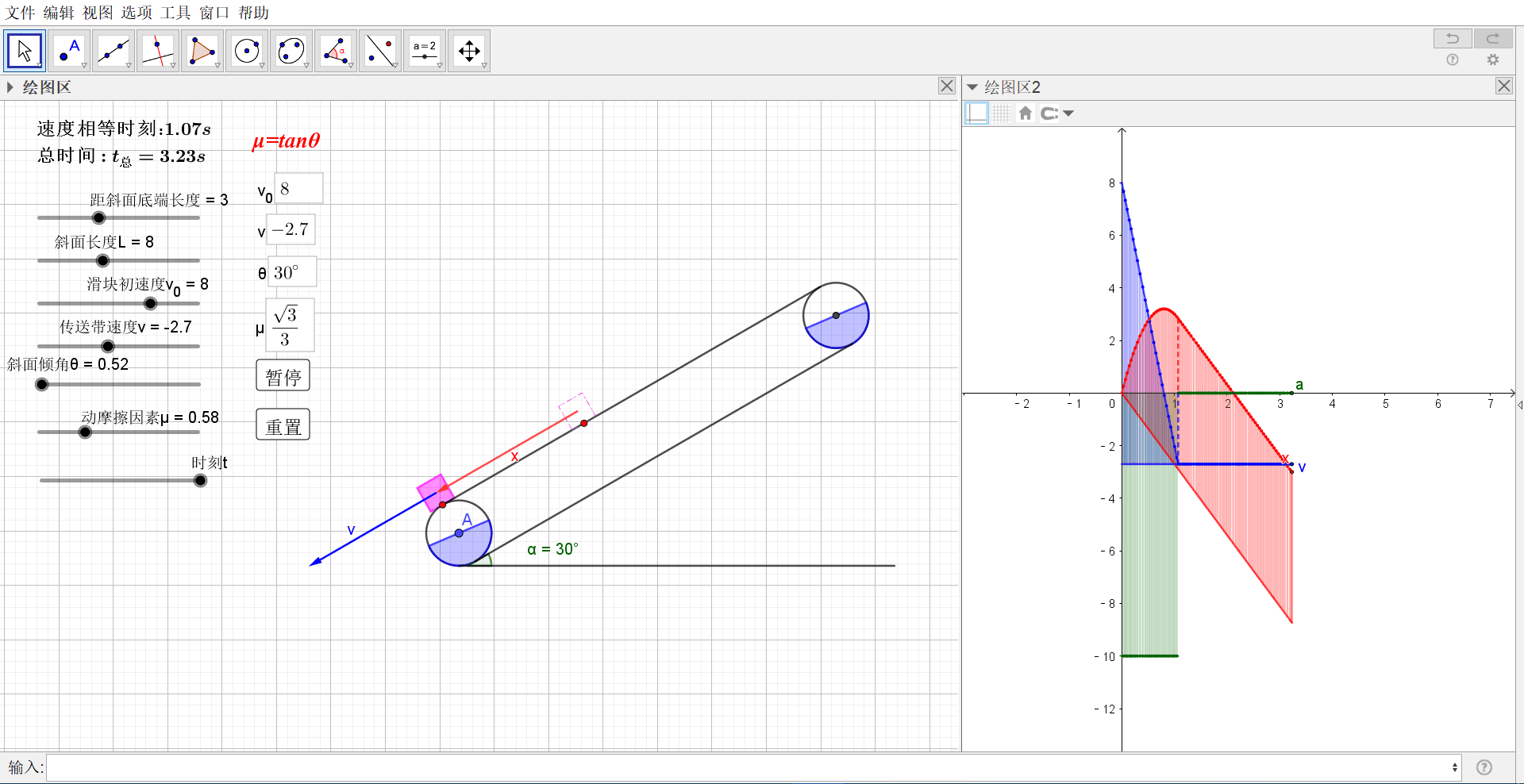
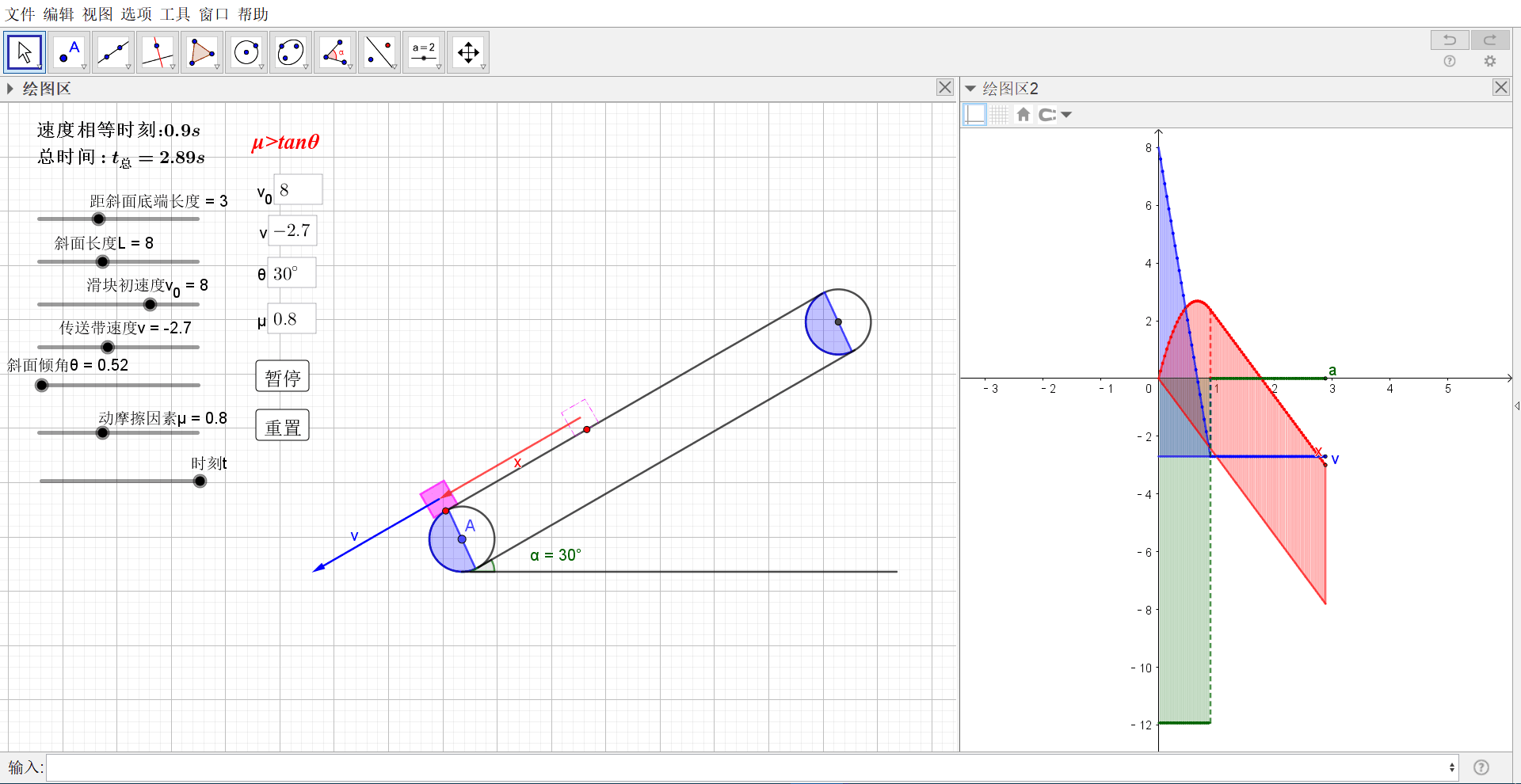
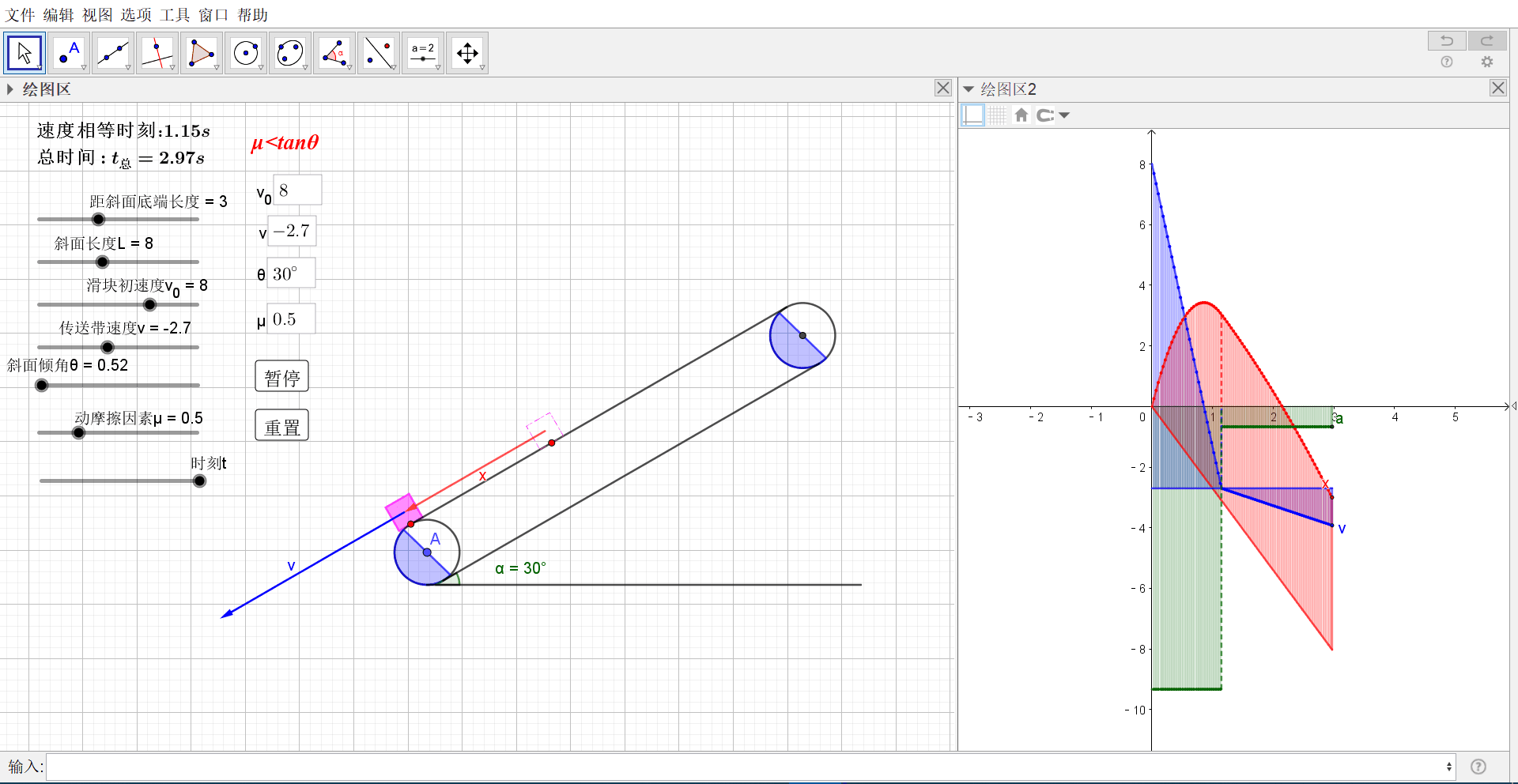
六、传送带—滑块模型
Tip:该题目涉及较多的参量,模拟较为复杂,限于篇幅,本文无法一一阐述其中原理,细节部分留给各位读者思考其背后原理。
7.1 建立滑动条(或数字):斜面长度L;传送带速度v;重力加速度g=10;摩擦系数μ;滑块初速度v_0;相对速度:dv_0=v_0-v;距斜面底端距离b;斜面倾角θ;时刻t.
7.2 做出 函数q_1(x)=如果(x≥0, L - b);
数字t_2=(-dv_0) / (μ g cos(θ) - g sin(θ));
数字a_1=g sin(θ) + μ g cos(θ);
函数h_1=如果(0 ≤ x ≤ dv_0 / a_1, v_0 x - 0.5a_1 x², 如果(x > dv_0 / a_1, v_0 dv_0 / a_1 - 0.5a_1 (dv_0 / a_1)² + v (x - dv_0 / a_1)));
数字a_3=μ g cos(θ) - g sin(θ);
函数s_1=如果(0 ≤ x ≤ t_2, v_0 x + 0.5a_3 x², 如果(x > t_2, v_0 t_2 + 0.5a_3 t_2² + v (x - t_2)));
数字a_2=a_4=g sin(θ) - μ g cos(θ);
函数p_1=如果(0 ≤ x ≤ dv_0 / a_1, v_0 x - 0.5a_1 x², 如果(x > dv_0 / a_1, v_0 dv_0 / a_1 - 0.5a_1 (dv_0 / a_1)² + v (x - dv_0 / a_1) - 0.5a_2 (x - dv_0 / a_1)²));
函数f_2=v_0 x - 0.5a_4 x²;
函数g_2=如果(μ ≥ tanθ, h_1, p_1);
函数h_2=如果(μ ≥ tanθ, s_1, f_2);
函数p_2=如果(dv_0 ≥ 0, g_2, h_2);
函数r_1=如果(x ≥ 0, -b)。
7.3 做出 点Z=交点(p_2, r_1, 0, 50);建立滑动条滑块尺寸s;滚轮半径r;任意取点A作为传送带底部轴心;以A为圆心,r为半径作圆d;作点B=A + (L cos(θ), L sin(θ))作为传送带顶部轴心;以B为圆心,r为半径作圆c;连接线段AB(f);过点A作AB的垂线h;c与h的交点E、F;方向向量s=(cos(θ), sin(θ));点J=F + (b cos(θ), b sin(θ));过点A作AB的垂线g_1;d与g_1交点C、D;连接线段DF(i);作直线eq1:x = x(A);eq1与圆c交点G、H;点I= H + (L, 0);连接线段HI(k);数字b_1=1/2 s;点K= J - b_1 (cos(θ), sin(θ));点M= J + b_1 (cos(θ), sin(θ));做出poly1=多边形(K, M, 4);
7.4 作点X=如果(0 ≤ t ≤ dv_0 / a_1, J + s (v_0 t - 0.5a_1 t²), 如果(t > dv_0 / a_1, J + s (v_0 dv_0 / a_1 - 0.5a_1 (dv_0 / a_1)² + v (t - dv_0 / a_1))));
点P=如果(0 ≤ t ≤ dv_0 / a_1, J + s (v_0 t - 0.5a_1 t²), 如果(t > dv_0 / a_1, J + s (v_0 dv_0 / a_1 - 0.5a_1 (dv_0 / a_1)² + v (t - dv_0 / a_1) - 0.5a_2 (t - dv_0 / a_1)²)));
点Q=如果(μ ≥ tanθ, X, P);连接线段CE(j);
作k与j的夹角α;
点R=如果(0 ≤ t ≤ t_2, J + s (v_0 t + 0.5a_3 t²), 如果(t > t_2, J + s (v_0 t_2 + 0.5a_3 t_2² + v (t - t_2))));
点S= J + s (v_0 t - 0.5a_4 t²);
点T=如果(μ ≥ tanθ, R, S);
点U=如果(dv_0≥0, Q ,T);
多边形poly1'=平移(poly1, 向量(J, U));
7.5 设数字t_1=dv_0 / a_1;点W=交点(p_2, q_1, 0, 50);
数字o=如果(x(W) / x(W) ≟ 1, x(W), 120);
数字u=如果(x(Z) / x(Z) ≟ 1, x(Z), 120);
数字w=最小值(o, u);
函数q_2=导数(p_2, x);
函数r_2=如果(0 ≤ x ≤ w, q_2(x));
函数s_2=如果(0 ≤ x ≤ w, p_2(x));
点V= (t, s_2(t));点A_1= (t, r_2(t));点B_1= (t, v);点C_1= (t, v t);点D_1= (w, v);点E_1= (0, v);点F_1= (t, v t);点G_1(0,0);连接线段A_1B_1(a);连接线段C_1V(e);连接线段B_1E_1(f_1);连接线段F_1G_1(i_1);
7.6 过点J作i的垂线;以J为圆心,b_1为半径作圆c_1;c_1与j_1的交点I_1、H_1;作向量u_1=平移(向量(J, U), I_1);点K_1=形心(poly1');向量J_1=平移(向量(r_2(t) s), K_1);函数r_2’=导数(r_2);作点L_1=(t, r_2'(t));点M_1=(t, 0);作线段L_1M_1(k_1);f_3=v;点N_1=交点(r_2, f_3, 0, 100);点O_1=(x(N_1), s_2(x(N_1)));点P_1=(x(N_1), r_2'(N_1));点Q_1=(x(N_1), 0);连接线段O_1Q_1(l_1);线段N_1Q_1(m_1);线段P_1Q_1(n_1);数字d_1=线段(O_1, Q_1);e_1=如果(d_1 / d_1 ≟ 1, d_1);作点G’=旋转(G, -v t / r, A);H’=旋转(H, -v t / r, A);c_2=圆扇形(A, G', H');d_2=圆扇形(A, H', G');e_2=平移(d_2, 向量(A, B));k_2=平移(c_2, 向量(A, B));函数g_3=如果(0 ≤ x ≤ t, v x);
7.7其实,滑块相对于传送带的位移也是可以用一个量来表示的,应用GeoGebra的“积分介于( <函数>, < 函数>, <x -起始值>, </x><x -终止值> )”指令,可以表示夹在两函数之间的图形面积,大家可以自行尝试。
·作业内容:
★必做题目:
1,回到出发点的匀变速直线运动:v=-t+5
2,探究矩形面积和与梯形面积的关系
3,变加速直线运动:
4,简谐运动
5,雨滴下落模型
★选做题目:
1,雨滴下落拓展:f=-kv^2的运动
2,初速度为v_0,与水平方向夹角为θ的斜上抛,f=-kv
3,探究几种电磁感应金属棒的运动
4,尝试模拟汽车恒功率启动过程
5,构造地球卫星运动模型
☆挑战题目:
尝试模拟传送带—滑块动画
致谢:
假期伊始,新课题的编写被提上日程,到这篇让我掉了不少头发的文章正式完稿,感谢所有鼎力支持新课题推进的朋友。在最后一周课题“付梓”之际,首先我要万分感谢我的指导老师——qiusir。从任务的选取到框架的制定,从学术支持到技术编辑,qiusir都给予了我前所未有的支持。同时感谢江苏仪征李夏岩同学为本周课题进行首次试验,并提出宝贵建议;感谢侯明玄同学和黄鑫阳同学为本周课题录制首批助教视频。
参考文献:
[1]陈海涛,金惠吉,杨秀发等.基于GeoGebra和VPython的天体运行数值模拟[J].物理通报,2022(09):133-137+140.
[2]秦智,曲峰林.基于GeoGebra的微积分可视化教学[J].高等数学研究,2022,25(06):83-86.
[3]陈婧,张东海,王晓锋.GeoGebra在高职微积分概念教学中的应用举例[J].中国教育技术装备,2017(10):42-45.
[4]朱亚军.借助GeoGebra深度剖析一道调研测试题[J].物理教师,2022,43(12):90-91+94.
[5]何秋静,杨文韬,王晓雅等.新冠疫情下“停课不停学”的大学物理GeoGebra仿真单摆实验[J].大学物理实验,2021,34(01):87-91.DOI:10.14139/j.cnki.cn22-1228.2021.01.023.
[6]涂世超. MBI模式下利用GeoGebra软件在高中物理中的可视化教学研究[D].贵州师范大学,2023.DOI:10.27048/d.cnki.ggzsu.2023.000425.
[7]阻力与速度成正比的运动
为保障新课题的按时交付,本人仔细研读了有关问题的各类文章,写作期间未敢不全力以赴。尽管如此,只怕本人能力所限,到头来或难免真知灼见鲜有,错误纰露不断,所以请各位读者可用批判之眼光看待此文。欢迎各位读者提供宝贵意见。
新课题仍在完善中……
“Me importa más cómo ser una persona amable que ser una persona excelente.”
(比起做一个优秀的人,我更在乎做一个善良的人。—梅西)
2023年8月15日深夜 于家中
豪
八 15
我在东北育才的五年......
拾慧|〖寻章摘句〗 评论关闭
小杜同学的这篇文章在求师得公号上的浏览量已攀升到第一了,他在东北育才的五年[?]超过我在北方的五十年[?]。这篇文章我也是读了几遍,有几段话印象深刻,特别推荐给他的学弟学妹们。
我在东北育才的五年......
-学习与成长-
杜政泽/香港大学
东北育才高中部2108班,曾获PhysicsBowl金奖,Math Kangaroo数学竞赛金奖...
在临近前往香港之际,我收到了qiusir约稿邀请,内心既激动又忐忑。激动的是时隔一年半又可以回到求师得这个讲台,来讲述我这几年的学习与成长;忐忑的是我只是一个很普通的育才学生,相比于其他大佬,自己水平属实有些不够看。只好在这里讲述一下在育才这几年自己的一些经历和感悟,供大家借鉴。
初识育才是在小学四年级,那时候“育才”这两个字似乎显得如此高不可攀。从那时起,我便把育才当作了我的奋斗目标。我不再把学习精力全部放在小学课堂,而是在外面报了一个奥数班。在奥数班里,我才发现原来数学是一个如此奇妙的学科,而我也逐渐喜欢上了动笔计算的感觉。
就这样到了初中,我考入了育才双语。寄宿生活对我来说是非常新鲜的事情,也是一种新的挑战(到现在也还记得住宿第一天在寝室里偷偷讲话被老师发现)。学习的科数从三科变成了七科,又变成了九科。骤增的学习压力一度让我无从下手,也无法适应。在初一期中考试,我考了年级300名。我觉得我需要做出一些学习方法上的改变。比如做作业,就要大概先了解一下每科作业应该需要多少时间。相对薄弱的科目一定要多留出一点时间练习(虽然可能不怎么爱做),非常擅长的科目就可以少留时间尽量做,做不完也问题不大。还比如多问老师,整理错题等等。这些习惯现在感觉是理所当然,但是我确实是踩到了一个又一个坑才总结出来一套相对适合自己的学习方法。而且育才也确实需要自己跟同学互卷。教室里说着不卷了,结果在凌晨寝室厕所里相遇都是常有的事。想起这段经历,我都会感到发自内心的快乐和充实。
直升那半年,我认识了qiusir。刚开始由于疫情原因,只能在家上网课,隔着屏幕听qiusir讲课。第一节课就感觉到qiusir讲课是思考,理解>做题。用不同的方法,找到其中相通的地方,这样的学习方法也让我有了很大的进步。后来我参与了qiutopia的动态数理项目。在五周的学习中,从平面到立体,从静态到动态,从简单的点点连线到最后的序列与迭代,每一周都有任务让我绞尽脑汁,每一周都会让我对“数形结合”有了新的认知。而且每一周都有需要自己探索,查阅资料的内容,也极大地锻炼了我的自主学习能力。后来我又当了求师得week5的助教。助教不仅需要自己做得明白,还得能讲得明白。这更需要自己对知识点的深入理解,导致我现在还清楚的记得week5每一道题的做法。
在直升这半年,我又做了一个决定,就是留学。做出这个决定的原因可能很不寻常,我当时就是看中了香港科技大学,并且发现用走国际考试入学只需要两年的学习时间,学习难度也相对来说比较小。于是,我便走上了留学这条路。在高一上学期,我没有完全脱产,一周五天半待在育才,一天半用来应付留学考试。这样的生活无疑是很紧张的,在考完两轮留学考试后,我就开始了我的脱产学习生活。
脱产学习生活并没有我想象的那么简单。对我影响最大的应该就是留学机构和育才天差地别的学习氛围。在这个可以说是鱼龙混杂的地方,管不了别人,就只能管好自己,好好学习考出好成绩是我唯一的出路。或许是缘分,在留学机构教我课的老师们,其中有两位高中时是qiusir的学生,我得知这件事时非常惊讶,当时都认为考不好这两科都对不起qiusir(笑)。索性一切都在向好的方向发展着,我也拿到了让自己满意的成绩。

在这些年学习中,我时刻都能感觉到自己有多么渺小,但学习也让我感觉到了自己无限的潜力。每天能有所学,每天都在进步,对我来说就已经足够了。真心地祝愿大家,愿学习的路上,求知之心永不熄灭,如同星辰般明亮照耀前行;愿敢于追寻知识的边界,探索未知的领域;愿在遇到挑战时,拥有坚韧的毅力,勇敢地面对困难,不畏艰险,不言放弃。

八 08


邻居家的鹦鹉飞到我家阳台上,它们也和蜻蜓一样奔着三角梅的吗?
不仅复瓣的茉莉又又开花了,阳台那两株三角梅的花也没断过...
某年的立秋是在上海旅游,去年似乎是在河边远足,今年却还是很忙...
都说后生可畏,小杜同学“在东北育才的五年”的浏览量直追我那“北方五十年”...
帅坤一面表扬我五十了还挺有活力,一面转我中国教师平均寿命的数据,那59可是包括了女教师的。就我,睡着普罗克拉斯提斯的床,做着乌托邦的梦,干着西西弗斯的活......唉,争取好好活到退休吧...
{kind=link}
{kind=link}